SLAM: Bagaimana Mesin Bisa Menemukan Diri di Dunia Nyata

(sumber: https://blogs.nvidia.com/blog/what-is-simultaneous-localization-and-mapping-nvidia-jetson-isaac-sdk/)
Pernah kepikiran nggak bagaimana robot bisa berjalan di ruangan asing tanpa nyasar, atau bagaimana mobil otonom mampu mengenali lingkungan sambil bergerak cepat? Jawabannya ada pada satu teknologi kunci bernama Simultaneous Localization and Mapping (SLAM). Teknologi inilah yang membuat mesin bisa “paham” lingkungan sekitarnya seolah-olah memiliki insting navigasi seperti manusia dan menjadi fondasi utama robotika modern, drone otonom, kendaraan tanpa pengemudi, dan perangkat AR/VR. Yuk, kita bahas!
Get to know: SLAM
SLAM adalah teknik yang memungkinkan agen (robot, kamera, headset, drome) atau perangkat bergerak lainnya untuk membangun peta lingkungan sambil secara bersamaan memperkirakan posisinya dalam peta tersebut. Bayangkan kamu masuk ke ruangan baru dalam keadaan gelap: sambil meraba, kamu membangun gambaran mental tentang bentuk ruangan, sambil menandai posisi tubuhmu sendiri. Nah, SLAM melakukan hal yang sama, tetapi secara matematis dan otomatis.
Teknologi ini sangat penting karena banyak sistem modern, dari robot vacuum, drone, AR/VR headset, hingga mobil otonom membutuhkan kemampuan navigasi tanpa bergantung pada GPS atau landmark eksternal yang sudah diketahui. SLAM memberikan ‘kemandirian spasial’ pada perangkat.
Main Component
SLAM bekerja sebagai rangkaian proses yang saling terhubung: sensor mengumpulkan data, algoritma mengolah informasi, lalu sistem memperbarui peta dan posisinya secara real-time. Empat komponen utamanya adalah:
1. Sensor Input
SLAM dapat menggunakan berbagai sensor tergantung kebutuhan. Pemilihan sensor menentukan gaya kerja SLAM, apakah berbasis visual, laser, atau hybrid.
- Lidar, sangat akurat untuk jarak dan bentuk
- Kamera (monocular, stereo, depth)
- IMU (Inertial Measurement Unit), memberikan informasi percepatan dan rotasi.
- Radar, cocok untuk kondisi cuaca buruk
2. Fitur dan Landmark
Sistem SLAM mengekstrak elemen-elemen khusus dari lingkungan, misalnya sudut ruangan, pola tekstur, tepi objek, atau titik-titik 3D hasil lidar. Fitur ini dipakai sebagai “jangkar” agar robot tahu apakah ia pernah berada di suatu titik.
3. Estimasi Pose
SLAM harus terus memperkirakan posisi pose (x, y, z) dan orientasi (roll, pitch, yaw). Pose inilah yang kemudian menjadi dasar navigasi. Teknik umum untuk estimasi pose adalah Visual Odometry, Inertial Odometry, dan Sensor Fusion. Pengoptimisasian dilakukan dengan menggunakan metode probabilistik seperti Extended Kalman Filter (EKF), particle filter, atau optimization-based SLAM seperti Graph-SLAM.
4. Pembuatan dan Pembaruan Peta
SLAM membangun peta lingkungan baik dalam bentuk 2D grid map, 3D sparse map (poin-poin fitur), dan 3D dense map (mesh atau voxel). Setiap kali robot bergerak, peta diperbarui, sekaligus menyesuaikan posisi robot di dalamnya.
5. Loop Closure
Saat robot kembali ke tempat yang pernah dikunjungi, sistem mengenali lokasi itu, lalu:
- Mengoreksi drift posisi
- Merapikan keseluruhan peta
- Menyinkronkan lintasan dengan peta sebenarnya
Tanpa loop closure, SLAM akan makin melenceng jika dibiarkan.
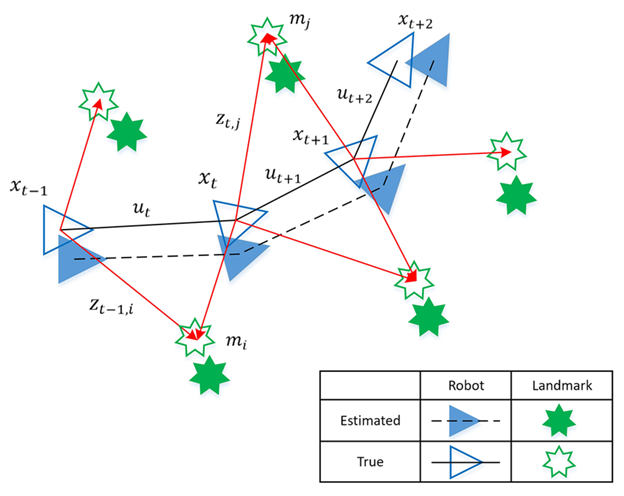
Diagram skematik dari SLAM (sumber: https://www.researchgate.net/publication/340904235_A_Novel_FastSLAM_Framework_Based_on_2D_Lidar_for_Autonomous_Mobile_Robot)
Jenis-jenis SLAM
1. Lidar-based SLAM
Menggunakan laser yang memancarkan titik cahaya yang dipantulkan kembali.
Sangat akurat, stabil, tahan situasi cahaya buruk, sayangnya sensornya cukup mahal. Algoritma populernya GMapping, Cartographer. Hector SLAM.
2. Visual SLAM (V-SLAM)
Mengandalkan kamera, murah, ringan, dapat menangkap informasi tekstur. Cocok untuk AR/VR/ Contoh sistem: ORB-SLAM, LSD-SLAM, DROID-SLAM.
3. Visual–Inertial SLAM (VI-SLAM)
Menggabungkan kamera dan IMU untuk meningkatkan stabilitas. Digunakan pada Apple ARKit, Google ARCore, Meta Quest (inside-out tracking). Sistem ini stabil pada gerakan cepat dan dapat menghitung pose dengan lebih presisi.
4. Graph-SLAM
Mengolah seluruh data sensor menjadi graph optimasi, lalu “merapikan” posisi semua node sehingga peta konsisten. Ini adalah teknik populer untuk SLAM modern karena fleksibel dan akurat
5. Dense SLAM
Berfokus pada peta 3D padat, contohnya KinectFusion dan ElasticFusion. Jenis ini cocok untuk manipulasi robot dan AR high-fidelity.
Conclusion
SLAM adalah fondasi dari banyak teknologi canggih yang kita lihat hari ini—robot pembersih, AR headset, drone cerdas, sampai mobil otonom. Dengan menggabungkan sensor, matematika, dan kecerdasan komputasi, SLAM memungkinkan mesin untuk memahami dunia fisik layaknya manusia. Ke depannya, perkembangan seperti deep learning-based SLAM dan multi-agent SLAM akan membuat robot semakin pintar, cepat, dan adaptif menghadapi dunia nyata.
Penulis
Felicia Natania Lingga, S.Kom. — FDP Scholar
Referensi
Hadji, S. E., Kazi, S., Hing, T. H, Ali, M. S. M. A Review: Simultaneous Localization and Mapping Algorithms. Jurnal Teknologi (Sciences & Engineering), 73(2), Special Issue on International Conference of Recent Trends In Information and Communication Technology (IRICT 2014). https://doi.org/10.11113/jt.v73.4188
Zhang, Z., & Zeng, J. (2022). A Survey on Visual Simultaneously Localization and Mapping. Frontiers in Computing and Intelligent Systems, 1(1), 18-21. https://doi.org/10.54097/fcis.v1i1.1089
Huang, B., Zhao, J., & Liu, J. (2019). A survey of simultaneous localization and mapping with an envision in 6G wireless networks. arXiv preprint arXiv:1909.05214.
Placed, J. A., Strader, J., Carrillo, H., Atanasov, N., Indelman, V., Carlone, L., & Castellanos, J. A. (2023). A survey on active simultaneous localization and mapping: State of the art and new frontiers. IEEE Transactions on Robotics, 39(3), 1686-1705. https://doi.org/10.1109/ TRO.2023.3248510
Razali, M. R., Mohd Faudzi, A. A., & Shamsudin, A. U. (2022). Visual Simultaneous Localization and Mapping: A review. PERINTIS EJournal, 12(1), 23–34. https://doi.org/10.5281/ zenodo.15873994
- Bresson, Z. Alsayed, L.Yuand S. Glaser, “Simultaneous Localization and Mapping: A Survey of Current Trends in Autonomous Driving,” in IEEE Transactions on Intelligent Vehicles, vol. 2, no. 3, pp. 194-220, Sept. 2017. https://doi.org/10.1109/TIV.2017.2749181